Как работает UART (интерфейс общения устройств)? Подробное руководство для Arduino и электроники
Разбираем работу UART — асинхронного интерфейса последовательной связи: структура кадра, бодрейт, биты чётности, аппаратный и программный UART в Arduino, примеры кода и распространённые проблемы.
В этой статье рассмотрим, как работает интерфейс общения микроконтроллеров — UART. Начинаем!
UART (Universal Asynchronous Receiver-Transmitter) — один из самых распространённых интерфейсов последовательной связи в микроконтроллерах, включая Arduino. Он используется для обмена данными между устройствами без тактового сигнала, что делает его простым и удобным для многих проектов.
В этой статье мы разберём:
- Что такое UART и зачем он нужен?
- Принцип работы UART (асинхронная передача данных)
- Скорость передачи (бодрейт), стоп-биты, биты чётности
- Аппаратный и программный UART в Arduino
- Примеры кода для работы с UART
- Распространённые проблемы и их решение
1. Что такое UART и зачем он нужен?
UART — это аппаратный модуль (или программная реализация), который преобразует параллельные данные (например, 8-битный байт) в последовательный поток битов и наоборот. Он используется для:
- Обмена данными между микроконтроллерами (Arduino, ESP, STM32 и др.)
- Подключения датчиков (GPS, Bluetooth-модули, MP3 Module)
- Общение с платой через компьютер, с помощью Serial Monitor в Arduino IDE
- Программирование микроконтроллеров через программаторы USB-UART (например, CH340)
Основные особенности UART:
Асинхронный — не требует тактового сигнала (в отличие от SPI или I2C).
Двунаправленный — передача (TX) и приём (RX) работают независимо.
Гибкие настройки — скорость (самые популярные скорости — 9600 и 115200), биты данных, контроль чётности.
2. Как работает UART? Асинхронная передача данных
UART передаёт данные по одному проводу (TX → RX) в виде последовательности битов. Рассмотрим формат кадра:

Структура UART-кадра
Каждый переданный байт «упаковывается» в кадр:
1. Стартовый бит (0) — сигнализирует о начале передачи.
2. Данные (5–9 бит) — полезная информация (обычно 8 бит).
3. Бит чётности (опционально) — проверка ошибок.
4. Стоп-бит(ы) (1 или 2) — завершает передачу.
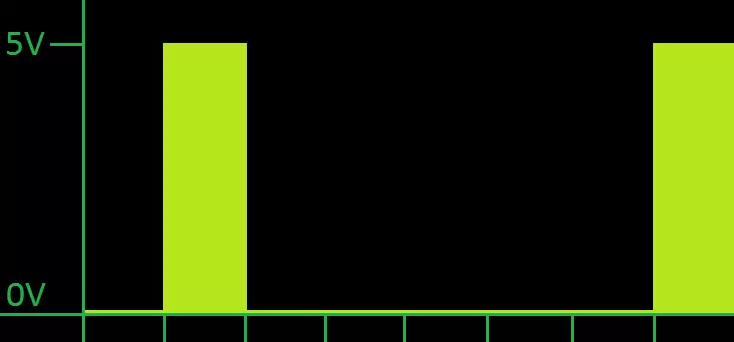
Пример передачи символа 'A' (0x41 в ASCII)
Двоичное представление: 01000001
1. Старт: 0
2. Данные: 0 1 0 0 0 0 0 1 (LSB first)
3. Стоп: 1
3. Настройки UART: скорость, биты данных, контроль чётности
Скорость передачи (бодрейт, Baud Rate)
Бодрейт определяет, сколько бит передаётся за секунду. Общие значения: 9600, 19200, 38400, 115200.
Скорость передачи настраивается в скетче:
```cpp
void setup(){
Serial.begin(9600); // Вот тут указывается скорость
}
void loop(){
}
`
Важно: Оба устройства (передатчик и приёмник) должны использовать одинаковую скорость! Иначе будут приниматься символы с ошибками.
Биты данных (5–9 бит)
Обычно 8 бит (стандартный размер байта), но бывают и другие варианты.
Бит чётности (Parity Bit)
Проверка ошибок передачи:
- None — без проверки (чаще всего).
- Even — чётное число единиц.
- Odd — нечётное число единиц.
Стоп-биты (1 или 2)
Определяет конец кадра. Обычно хватает 1 стоп-бита.
4. Аппаратный и программный UART в Arduino
Аппаратный UART (Hardware Serial)
В Arduino Uno (ATmega328P) есть один аппаратный UART (контакты 0 (RX) и 1 (TX)).
Пример кода:
```cpp
void setup() {
Serial.begin(9600); // Инициализация UART на скорости 9600 бод
}
void loop() {
Serial.println("Hello, UART!"); // Отправка данных
if (Serial.available()) {
char data = Serial.read(); // Чтение данных
}
}
`
Программный UART (SoftwareSerial)
Если аппаратных UART не хватает (например, для подключения GPS и Bluetooth), используют SoftwareSerial.
```cpp
#include <SoftwareSerial.h>
SoftwareSerial mySerial(2, 3); // RX, TX
void setup() {
mySerial.begin(9600);
}
void loop() {
mySerial.println("Привет! Это сообщение отправлено через SoftwareSerial");
}
`
5. Распространённые проблемы и их решение
1. Нет данных в Serial Monitor
Проверьте:
- Скорость передачи (должна совпадать в коде и мониторе).
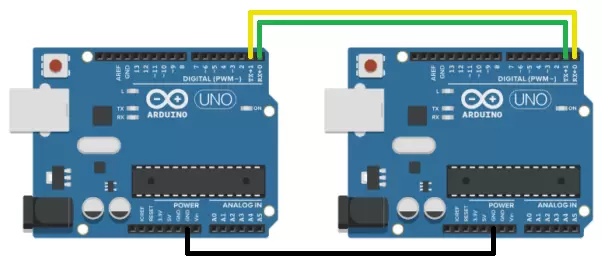
- Правильно ли подключены RX и TX (перекрёстно: TX (выход) → RX (вход), RX (вход) → TX (выход)).
2. Мусор в данных
Возможные причины:
- Разный бодрейт.
- Помехи в линии (используйте экранированные провода), обычно нормально работают обычные провода для макетных плат.
3. Конфликт аппаратного и программного UART
Если используете SoftwareSerial, избегайте контактов 0 и 1 (они заняты аппаратным UART). Для удобства рекомендуется использовать соседние пины — 2 и 3, 4 и 5 и т.д.
4. Особенность использования аппаратного UART
Если вы всё-таки решили подключать модули к пинам аппаратного UART, то есть одна особенность — при прошивке платы необходимо отключать подключенные модули от пинов D0 и D1, чтобы модули не создавали помех при прошивке.
Заключение
UART — простой и эффективный способ передачи данных между устройствами. Он используется в Arduino для отладки, подключения модулей и обмена информацией.
Ключевые моменты:
- UART работает асинхронно (без тактового сигнала).
- Важно правильно настроить скорость передачи (бодрейт).
- В Arduino есть аппаратный и программный UART.
Теперь вы знаете, как работает UART, и сможете использовать его в своих проектах!
Подключите школу к пилоту. Генерируйте КМЖ за 2 минуты, ведите CodeStudio уроки, заказывайте оборудование — всё в одном месте.